Skip to content
+989192626800
تهران - چهار راه ولیعصر
Linkedin
Instagram
Mail
Whatsapp
پروژه پایان نامه | معلم خصوصی | مدرسان امیرکبیر
پروژه پایان نامه | معلم خصوصی | مدرسان امیرکبیر | دانلود جزوه درسی و سفارش پروژه
پایان نامه ها
جزوه
خدمات آموزشی
درخواست معلم خصوصی
درخواست حل مسائل
همکاری
روند کاری سایت
قوانین سایت
ثبت نام رایگان به عنوان مدرس
تماس با ما
Search:
ورود
0
Checkout
No products in the cart.
Subtotal:
RIAL 0
Checkout
پایان نامه ها
جزوه
خدمات آموزشی
درخواست معلم خصوصی
درخواست حل مسائل
همکاری
روند کاری سایت
قوانین سایت
ثبت نام رایگان به عنوان مدرس
تماس با ما
control-design
You are here:
Home
control-design
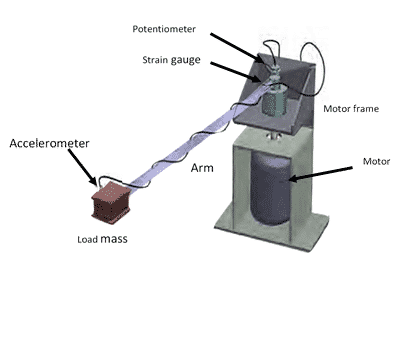
طراحی کنترل کننده کلاسیک و مدرن برای بازوی انعطاف پذیر
Go to Top