عنوان : طراحی کنترل کننده مدرن و کلاسیک برای مدل بازوی انعطاف پذیر
1- خلاصه
کنترل کننده – دراین پروژه ابتدا به معرفی و آشنایی با سیستمهای کنترلی کلاسیک و مدرن و انواع روشهای
طراحیهای کنترلی پرداخته شده است.
در پیرو این امر به آشنایی با انواع کنترلکنندههای فیدبک به صورت مختصر پرداخته شده است،
همچنین روش تعیین پارامترهای کنترلکننده PID بیان شده است. از میان روشهای تنظیم پارامترهای
کنترلکننده PID به روش زیگلر- نیکولز که یک روش ساده و در عین حال کارآمد میباشد پرداخته شده
است.
طراحی یک کنترل کننده PID که دارای پاسخی قابلقبول و مطلوب باشد در این پروژه یکی از
اهداف ما است که به آن پرداختهایم. ابتدا این طراحی به صورت دستی و با توجه به روش و معیار
زیگلر- نیکولز انجام شده است و سپس به کمک نرمافزار این کنترلکننده بهینه میشود و پاسخ مقایسه
میشود. در ادامه طراحی کنترل کننده PID به صورت کامل توسط نرمافزار انجام میشود و یک
کنترل کننده با ضرایب کاملاً بهینه که مطلوبترین پاسخ را میدهد، به دست میآید.
در ادامه به طراحی سیستم کنترل در فضای حالت پرداخته میشود و در این راستا مفاهیمی از
جمله کنترلپذیری و رویتپذیری و مسأله جایابی قطب بیان میشود، در کنار این مطالب به کاربرد زیاد
نرمافزار در این زمینه و حل مسأله جایابی قطب و طراحی رویتگر به کمک این نرمافزار پرداخته
میشود. قابل درک است که این فرآیندهای طراحی باید بر روی مدلی مناسب انجام پذیرد که به این
منظور مدل بازوی انعطافپذیر انتخاب شده است و تمام طراحیهای مذکور بر روی این مدل انجام
میپذیرد.
2- مقدمه – کنترل کننده
1-2) آشنایی با مدل بازوی انعطافپذیر ربات
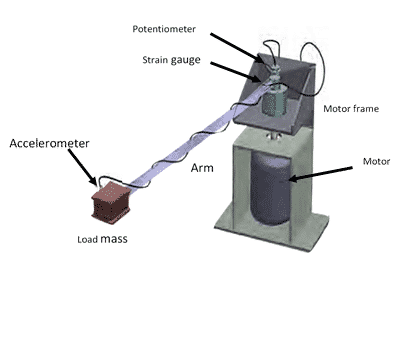
مدلی که برای طراحیها در این پروژه انتخاب شده است، مدل بازوی انعطافپذیر میباشدکه ساختار
فیزیکی آن در شکل (1-1) نمایش داده شده است. این مدل از اجزای مختلفی از جمله موتور، بازو (که
از جنس فلز منعطف میباشد و قابلیت انعطافپذیر بودن را دارد)، توان سنج 1 ، پتانسیومتر و فریم و قالبی
که این اجزا بر روی آن سوار میشوند تشکیل شده است. قابل درک است که مدلسازی کردن این بازو،
یعنی شناخت نحوه کنترل و حرکت آن و پیاده کردن این روند حرکتی در مدلی ریاضی کار سادهای
نیست، این روند به تابع تبدیلی خواهد انجامید که ما آن را در نمودار بلوکی حلقه بسته در شکل (1-2)
مشاهده میکنیم. در تمام این پروژه تمام طراحیها، محاسبات و شناختها (از جمله کنترلپذیری و رویتپذیری
و…) برای این مدل انجام شده است .
دانلود و دریافت پایان نامه در سایت مدرسان امیرکبیر ( هزینه 150 هزار تومان )





