Checkout
Subtotal: RIAL 0
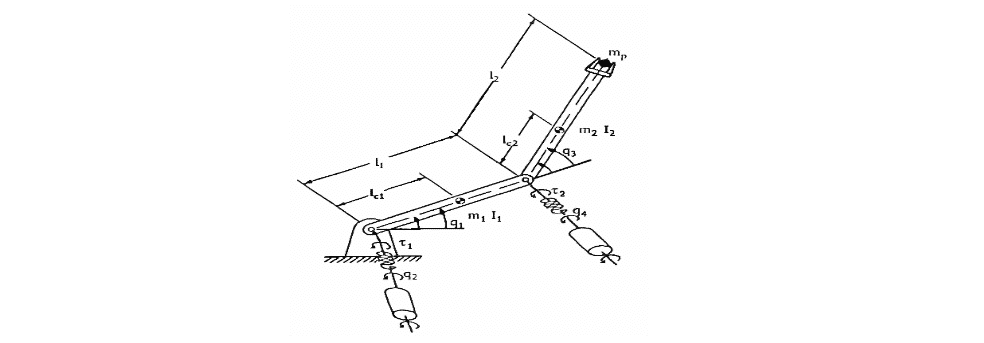
تعیین حداکثر ظرفیت حمل بار در رباتهای با مفاصل انعطاف پذیر به کمک کنترل مدرن